The development on Intelligent Transportation and Self-driving from Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences
 The IEEE IntelligentVehicle Symposium is one of the comprehensive conferences organized by the IEEEIntelligent Transport Association. It aims to hold a seminar of the mostadvanced technology for researchers, engineers, and scholars around the world.It is the world’s top conference with the highest level, largest scale, andlongest history on Intelligent vehicles.The 29th International Intelligent vehicle Conference was held in Changshu,China from June 26th to 30th, 2018. This year, the IEEE IV Symposium received603 papers from 34 countries and accepted 347 papers. The admission rate was57%.
The IEEE IntelligentVehicle Symposium is one of the comprehensive conferences organized by the IEEEIntelligent Transport Association. It aims to hold a seminar of the mostadvanced technology for researchers, engineers, and scholars around the world.It is the world’s top conference with the highest level, largest scale, andlongest history on Intelligent vehicles.The 29th International Intelligent vehicle Conference was held in Changshu,China from June 26th to 30th, 2018. This year, the IEEE IV Symposium received603 papers from 34 countries and accepted 347 papers. The admission rate was57%.
Recently, two paperswere accepted by IV 2018, which demonstrate the research results from team of Prof.Huiyun Li, the Director of Center for Automotive Electronics, ShenzhenInstitutes of Advanced Technology, Chinese Academy of Sciences.
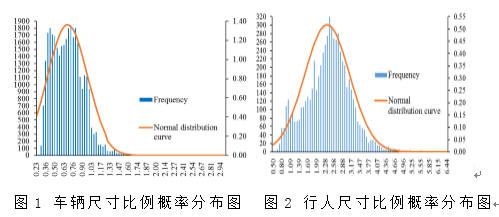
M.Sc.Zhiheng, Yang, the first author of the paper “Real-time Pedestrian and VehicleDetection for Autonomous Driving”, presented a pedestrian and vehicle detectionalgorithm to optimize feature extraction based on YOLOv2. This research takesadvantage of the priori experience on the sizes of feature boxes while performsstatistical analysis on the datasets with the labels of pedestrians andvehicles. Furthermore, the designed the initial value of the pre-selection boxis more representable for the characteristics of pedestrian and vehicle.Together with conventional training techniques for deep learning, this methodoptimizes the pedestrian and vehicle detection. The proposed algorithm not onlyimproves the detection accuracy but also maintains good detection efficiency.The experiments on KITTI dataset verify that the optimization algorithmsatisfies the real-time constraint as well as the accuracy of low-speedautonomous driving.
Ms.Jie Zou,as the first author ofImproved Sliding-Mode On-line Adaptive Position Control for AMT Clutch SystemsBased on Neural Networks, designed an improved Sliding-Mode position controllerbased on Neural Networks. The parameters of controller are tuned on-lineadaptively to control the clutch system to get better tracking performanceduring the vehicle starting. The clutch controller is embedded into a Modelica®based vehicle model and verified through the Model-in-the-Loop(MiL) simulation.The simulation results demonstrate that the controller has better trackingperformance and stronger robustness compared to the conventional controller,the parameters of which are tuned off-line via trial-and-error. That istime-consuming and often yield poor results. The method proposed in this paperenhances the generalization ability of the controller.
In addition, the IEEEIV2018 workshop entitled Intelligent Transportation and AutonomousVehicles hosted by Researcher Huiyun Li was successfully held inChangshu, China on June 26th, 2018.
2018-09-14



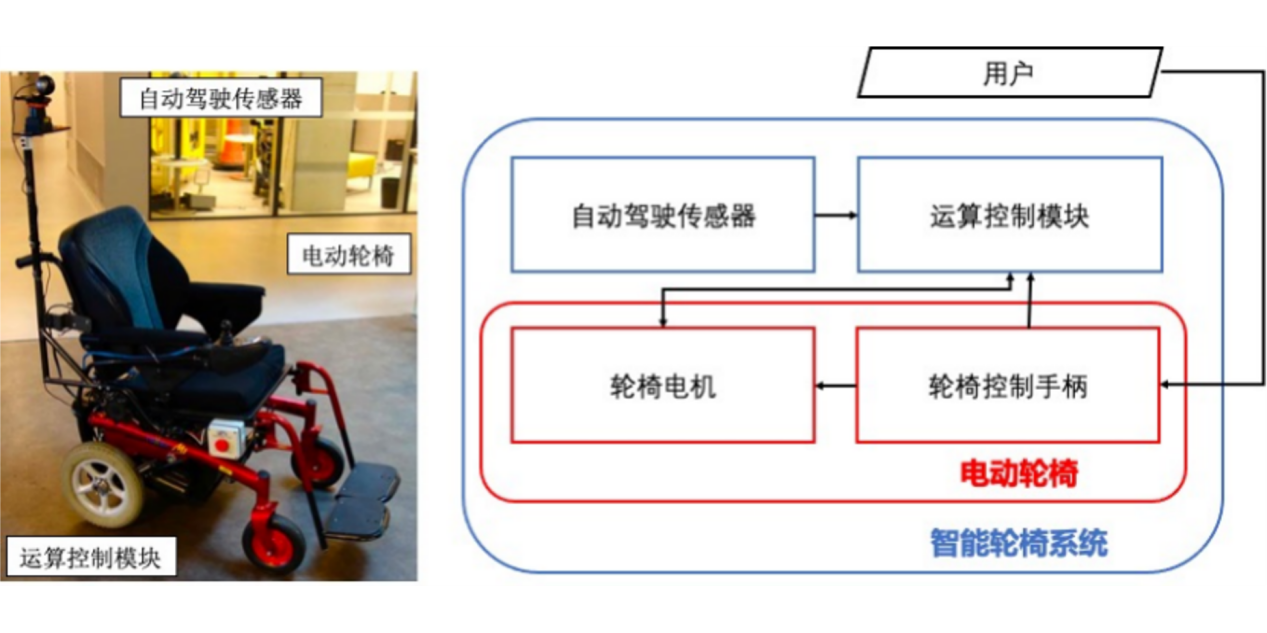 Presents a framework capable of providing active short-term navigation, combining the intelligence of active assistance with the freedom of location independence. Demonstration data from an able expert while driving the mobility aid in a standard indoor setting is used off-line to learn reference behavioral models of navigation given perceptual information from the platform surroundings and the input controls exerted by the user while navigating. These serve as the foundation for on-line probabilistic short-term destination inference using the instantaneously available data from the user and on-board sensors. This is coupled with a real-time stochastic optimal path generation able to exploit the same short term demonstration paths from the expert with the belief they capture both the drivers awareness of the platforms physical geometry and appropriate behaviors for their surroundings.
Presents a framework capable of providing active short-term navigation, combining the intelligence of active assistance with the freedom of location independence. Demonstration data from an able expert while driving the mobility aid in a standard indoor setting is used off-line to learn reference behavioral models of navigation given perceptual information from the platform surroundings and the input controls exerted by the user while navigating. These serve as the foundation for on-line probabilistic short-term destination inference using the instantaneously available data from the user and on-board sensors. This is coupled with a real-time stochastic optimal path generation able to exploit the same short term demonstration paths from the expert with the belief they capture both the drivers awareness of the platforms physical geometry and appropriate behaviors for their surroundings.