Omni-directional intelligent transfer AGV
The project is based on the design of key components such as the intelligent chassis, sensing system and control system of the intelligent electric vehicle independently developed by our team. The omni-directional universal chassis power adopts the modular hub motor direct drive
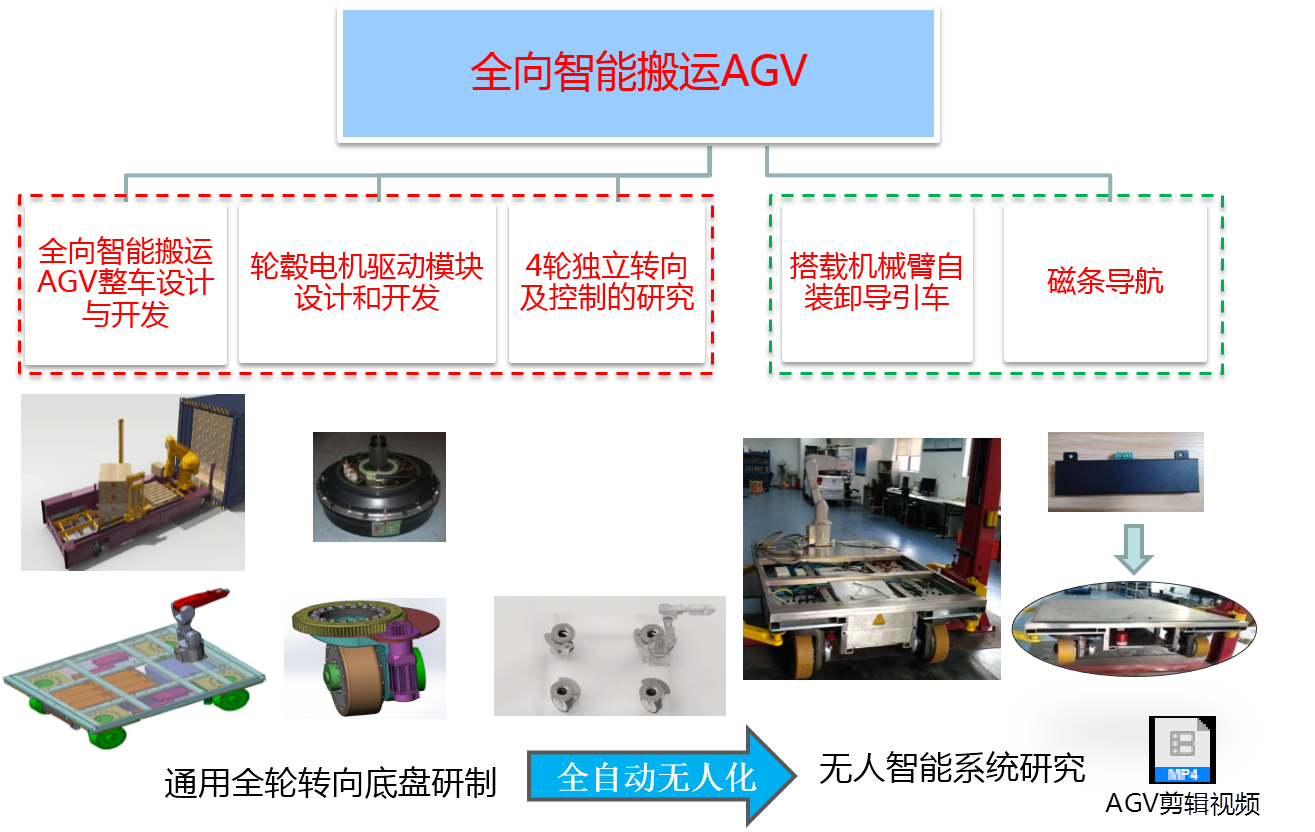 system, and the robot arm is mounted on the omni-directional universal chassis. Developed omni-directional intelligent transport AGV. The omni-directional intelligent transport AGV break through the problem of insufficient power and low load of the existing AGV and solve the problem of the free movement of the existing transfer robot. What different from traditional AGV, the project uses wheel hub motor technology to optimize the structure of the powertrain and chassis, and also to optimize the control strategy of the four-wheel independent power system, which fully enhances the flexibility and power performance of the entire s
ystem.The chassis of omni-directional intelligent AGV adopts 4 hub motor independent driving, which can realize 4 independent steering, with very strong steering flexibility, and the hub motor has electromagnetic brake function; The vehicle controller can use the tele-control device for wireless control and can also realize unmanned intelligent driving through the logistics dispatch system; the vehicle body adopts the fully welded steel plate structure and can load more than 2T goods.
system, and the robot arm is mounted on the omni-directional universal chassis. Developed omni-directional intelligent transport AGV. The omni-directional intelligent transport AGV break through the problem of insufficient power and low load of the existing AGV and solve the problem of the free movement of the existing transfer robot. What different from traditional AGV, the project uses wheel hub motor technology to optimize the structure of the powertrain and chassis, and also to optimize the control strategy of the four-wheel independent power system, which fully enhances the flexibility and power performance of the entire s
ystem.The chassis of omni-directional intelligent AGV adopts 4 hub motor independent driving, which can realize 4 independent steering, with very strong steering flexibility, and the hub motor has electromagnetic brake function; The vehicle controller can use the tele-control device for wireless control and can also realize unmanned intelligent driving through the logistics dispatch system; the vehicle body adopts the fully welded steel plate structure and can load more than 2T goods.
 方能在车规级芯片领域进行进一步的科学探索。
方能在车规级芯片领域进行进一步的科学探索。

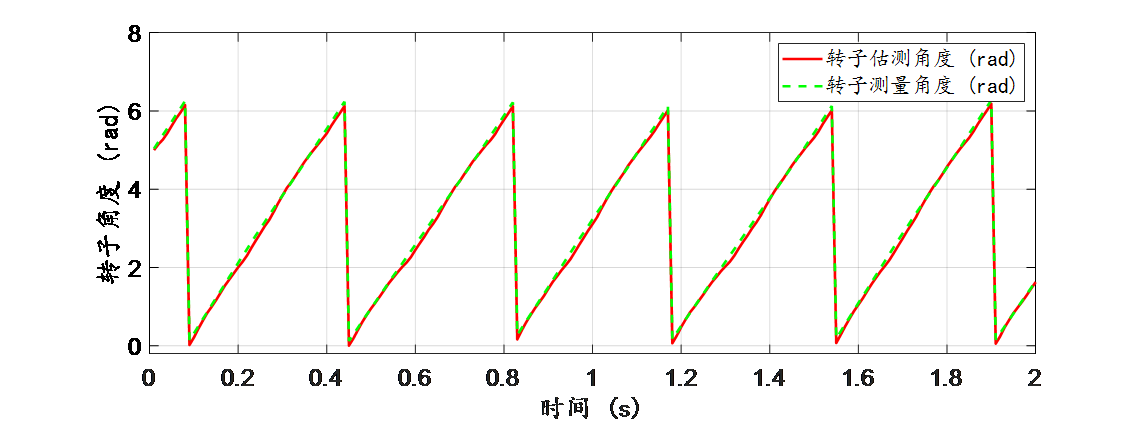
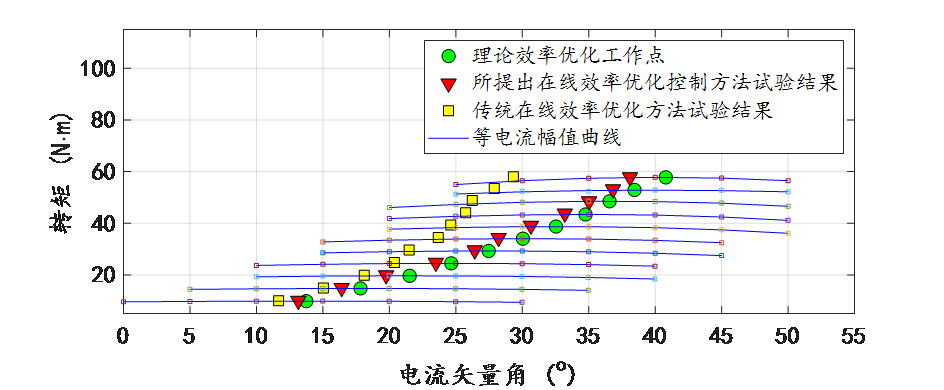
 制软件是变频电机系统的最关键技术之一。在芯片内部配套封装的高性能电机驱动控制软件系统以及功能完善的底层软件模块,对于推广国产芯片的应用具有重要推动作用。但是,研发高可靠性、高性能的变频电机驱动底层软件需要深厚的理论知识及实践经验,具有很高的技术门槛。针对这一实际情况,国民技术联合我中心孙天夫副研究员及其团队成员李可、郑伟杰等,基于国民技术N32G435/N32G455系列增强型MCU研发高性能电机驱动控制软件。研发包括电机参数自动辨识、电机磁极辨识、电机无位置传感、高性能速度环控制等核心底层软件模块。特别是所研发的同步电机无位置传感技术可通过纯软件手段实现对电机转子绝对位置的实时检测,并适用于电机零速、低速、高速等各种工况,从而省去了现有成本较高且容易损坏的电机位置传感器,为相关用户企业节省成本、减少维护提供完整的解决方案。
制软件是变频电机系统的最关键技术之一。在芯片内部配套封装的高性能电机驱动控制软件系统以及功能完善的底层软件模块,对于推广国产芯片的应用具有重要推动作用。但是,研发高可靠性、高性能的变频电机驱动底层软件需要深厚的理论知识及实践经验,具有很高的技术门槛。针对这一实际情况,国民技术联合我中心孙天夫副研究员及其团队成员李可、郑伟杰等,基于国民技术N32G435/N32G455系列增强型MCU研发高性能电机驱动控制软件。研发包括电机参数自动辨识、电机磁极辨识、电机无位置传感、高性能速度环控制等核心底层软件模块。特别是所研发的同步电机无位置传感技术可通过纯软件手段实现对电机转子绝对位置的实时检测,并适用于电机零速、低速、高速等各种工况,从而省去了现有成本较高且容易损坏的电机位置传感器,为相关用户企业节省成本、减少维护提供完整的解决方案。