组建联合实验室:智能汽车电子测试验证及系统仿真
汽车电子研究中心与深圳市中科华劢科技有限公司共同宣布成立“智能汽车电子测试验证及系统仿真联合实验室”(以下简称联合实验室),并于2021年12月8日举行揭牌仪式。智能汽车电子测试验证及系统仿真联合实验室将主要围绕车规级芯片、传感器等电子元器件的测试验证,以
 及系统级仿真验证与测试等方面的前沿技术研究、新产品开发、技术平台建立及人才培养等多层面进行广泛合作,包括博士后培养,同时还包括双方共同申请各级科技资助计划项目等。联合实验室项目负责人李慧云表示,先进院汽车电子中心致力于新能源汽车整车控制集成、动力学、车联网及智能驾驶技术等前沿领域研究,通过此次的合作,双方能在车规级芯片领域进行进一步的科学探索。
及系统级仿真验证与测试等方面的前沿技术研究、新产品开发、技术平台建立及人才培养等多层面进行广泛合作,包括博士后培养,同时还包括双方共同申请各级科技资助计划项目等。联合实验室项目负责人李慧云表示,先进院汽车电子中心致力于新能源汽车整车控制集成、动力学、车联网及智能驾驶技术等前沿领域研究,通过此次的合作,双方能在车规级芯片领域进行进一步的科学探索。
 富的智能驾驶测试场景库,提高开发效率,降低开发成本;(3)提供了丰富的传感器模型;具备摄像头、激光雷达、毫米波雷达、V2X链路模拟、GNSS定位模拟等集成使用;(4)集成高精度车辆动力学模型,能够模拟整车动力学特性,支持与虚拟场景进行数据实时通信,实时显示;
富的智能驾驶测试场景库,提高开发效率,降低开发成本;(3)提供了丰富的传感器模型;具备摄像头、激光雷达、毫米波雷达、V2X链路模拟、GNSS定位模拟等集成使用;(4)集成高精度车辆动力学模型,能够模拟整车动力学特性,支持与虚拟场景进行数据实时通信,实时显示;
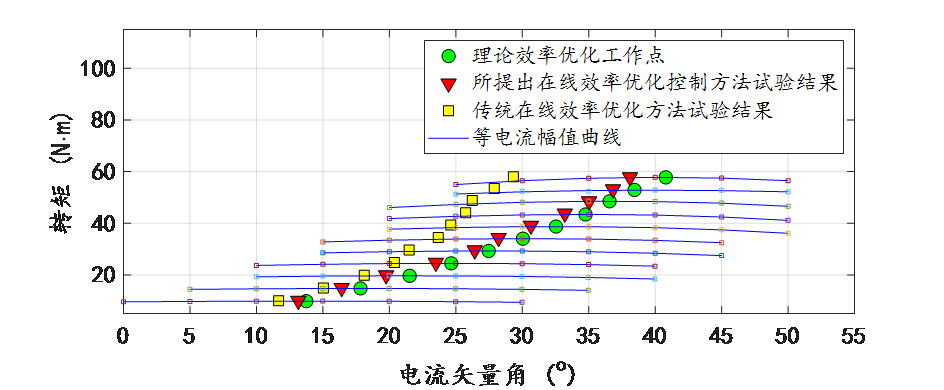
 器人、电动汽车、先进制造、家用电器等国民生产生活的各个领域,是现代工业的基础。变频电机系统运行时,其主控芯片基于传感器所采集的相电流、电压、转子角度、温度等信号,通过高速实时运算判断电机的运行状态,继而控制电力电子器件开关管状态驱动电机运行。因此变频电机系统主控芯片(MCU)以及运行于芯片之中的电机驱动控制软件是变频电机系统的最关键技术之一。在芯片内部配套封装的高性能电机驱动控制软件系统以及功能完善的底层软件模块,对于推广国产芯片的应用具有重要推动作用。但是,研发高可靠性、高性能的变频电机驱动底层软件需要深厚的理论知识及实践经验,具有很高的技术门槛。针对这一实际情况,
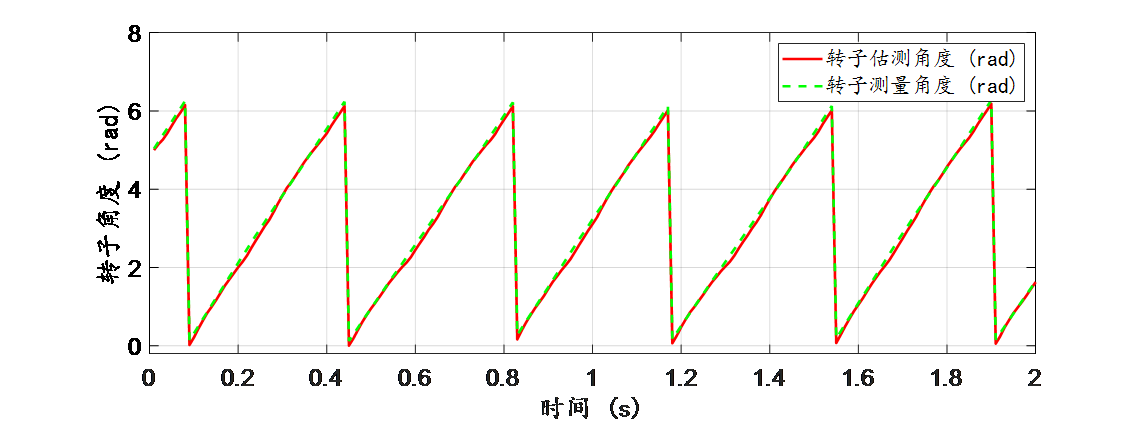
国民技术联合我中心孙天夫副研究员及其团队成员李可、郑伟杰等,基于国民技术N32G435/N32G455系列增强型MCU研发高性能电机驱动控制软件。研发包括电机参数自动辨识、电机磁极辨识、电机无位置传感、高性能速度环控制等核心底层软件模块。特别是所研发的同步电机无位置传感技术可通过纯软件手段实现对电机转子绝对位置的实时检测,并适用于电机零速、低速、高速等各种工况,从而省去了现有成本较高且容易损坏的电机位置传感器,为相关用户企业节省成本、减少维护提供完整的解决方案。
器人、电动汽车、先进制造、家用电器等国民生产生活的各个领域,是现代工业的基础。变频电机系统运行时,其主控芯片基于传感器所采集的相电流、电压、转子角度、温度等信号,通过高速实时运算判断电机的运行状态,继而控制电力电子器件开关管状态驱动电机运行。因此变频电机系统主控芯片(MCU)以及运行于芯片之中的电机驱动控制软件是变频电机系统的最关键技术之一。在芯片内部配套封装的高性能电机驱动控制软件系统以及功能完善的底层软件模块,对于推广国产芯片的应用具有重要推动作用。但是,研发高可靠性、高性能的变频电机驱动底层软件需要深厚的理论知识及实践经验,具有很高的技术门槛。针对这一实际情况,
国民技术联合我中心孙天夫副研究员及其团队成员李可、郑伟杰等,基于国民技术N32G435/N32G455系列增强型MCU研发高性能电机驱动控制软件。研发包括电机参数自动辨识、电机磁极辨识、电机无位置传感、高性能速度环控制等核心底层软件模块。特别是所研发的同步电机无位置传感技术可通过纯软件手段实现对电机转子绝对位置的实时检测,并适用于电机零速、低速、高速等各种工况,从而省去了现有成本较高且容易损坏的电机位置传感器,为相关用户企业节省成本、减少维护提供完整的解决方案。
 ;发动机与发电机柔性连接。
;发动机与发电机柔性连接。

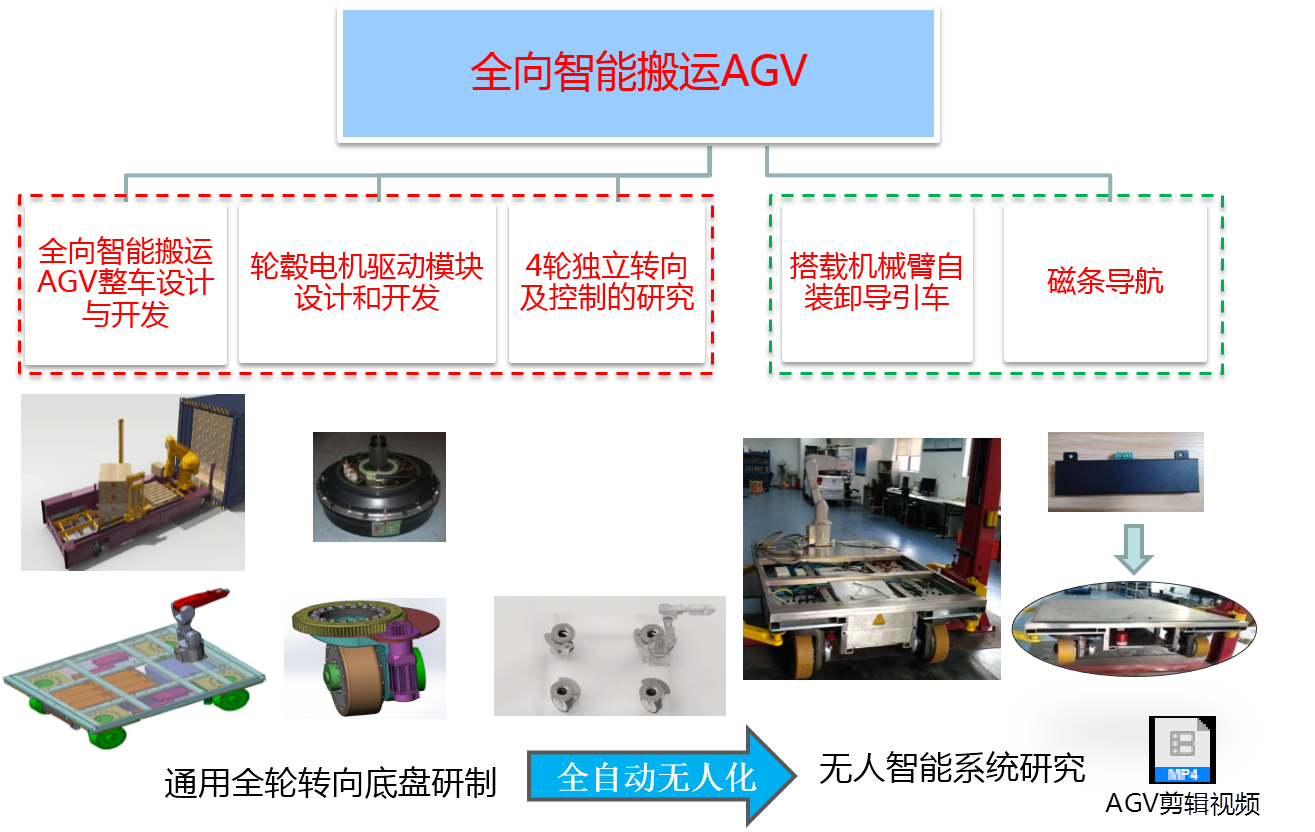 别于传统AGV,本项目采用轮毂电机技术优化动力系统和底盘的结构、同时优化四轮独立动力系统的控制策略,全面提升了整个系统的灵活性和动力性能。全向智能搬运AGV底盘采用4个轮毂电机独立分布式驱动,可实现4轮独立转向,具有非常强的转向灵活性,且轮毂电机具有电磁刹车功能;整车控制器可以采用遥控装置进行无线控制,也可通过物流调度系统实现无人智能行驶;整车车身采用全焊接钢板结构,可以承载2T以上货物。
别于传统AGV,本项目采用轮毂电机技术优化动力系统和底盘的结构、同时优化四轮独立动力系统的控制策略,全面提升了整个系统的灵活性和动力性能。全向智能搬运AGV底盘采用4个轮毂电机独立分布式驱动,可实现4轮独立转向,具有非常强的转向灵活性,且轮毂电机具有电磁刹车功能;整车控制器可以采用遥控装置进行无线控制,也可通过物流调度系统实现无人智能行驶;整车车身采用全焊接钢板结构,可以承载2T以上货物。
