环境感知是自动驾驶系统的核心组成部分,主要涉及对路面、静态物体和动态物体的精确探测和识别。该方向针对车用雷达和机器视觉的信息融合技术,以及视觉探测与测量技术中空间三维信息构建等新技术进行研究。
研究方向简介 / Research Direction
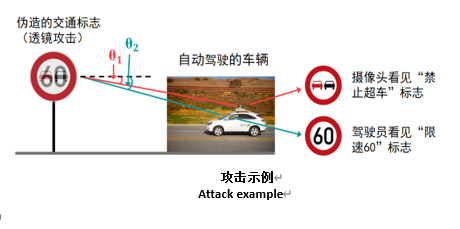
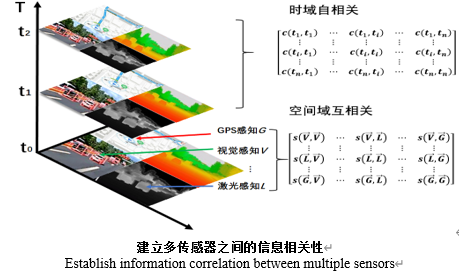
无人车感知系统的攻击防御技术 / Selected Projects
成果 / Intellectual Properties
代表性论文 / Selected Papers
李慧云, 邵翠萍, 陈贝章, 等. 基于矩阵补全的无人车感知系统的攻击防御技术 [J]. 集成技术, 2020, 9(5):5-16
Huiyun Li; Cuiping Shao*; Zheng Wang; Detecting Fault Injection Attacks Based on Compressed Sensing and Integer Linear Programming, IEEE Transactions on Dependable and Secure Computing, 2018, 16(3): 476-483. (SCI JCR 1区)
Huiyun Li; Guanghua Du; Cuiping Shao; Liang Dai; Guoqing Xu; Jinlong Guo; Heavy-Ion Microbeam Fault Injection into SRAM-Based FPGA Implementations of Cryptographic Circuits, IEEE Transactions on Nuclear Science, 2015, 62(3): 1341-1348 (SCI JCR 1区)
代表性专利 / Selected Patents
邵翠萍、李慧云、陈贝章,一种智能化系统的防御方法及相关装置,申请日:2020/06/09,申请号:CN202010519394.7
邵翠萍; 李慧云; 徐国卿;一种抗错误注入攻击的安全芯片加固方法及装置,专利号:ZL201510355203.7 ,授权公告日:2018年8月3日
