整车控制系统包括动力系统、能量系统、底盘电子控制系统、照明指示系统、仪表显示系统、辅助系统、整车综合控制系统、空调系统和安全系统等等。整车控制是电动汽车控制系统核心,承担整车数据的交换、整车安全管理、驾驶员意图传递、动力分配管理和能量分配管理的任务,影响者整车的动力性和经济性、安全性、驾驶舒适性与整车的协调控制。
研究方向简介 / Research Direction
面向车联网的城市级停车实时搜索引擎 / Selected Projects
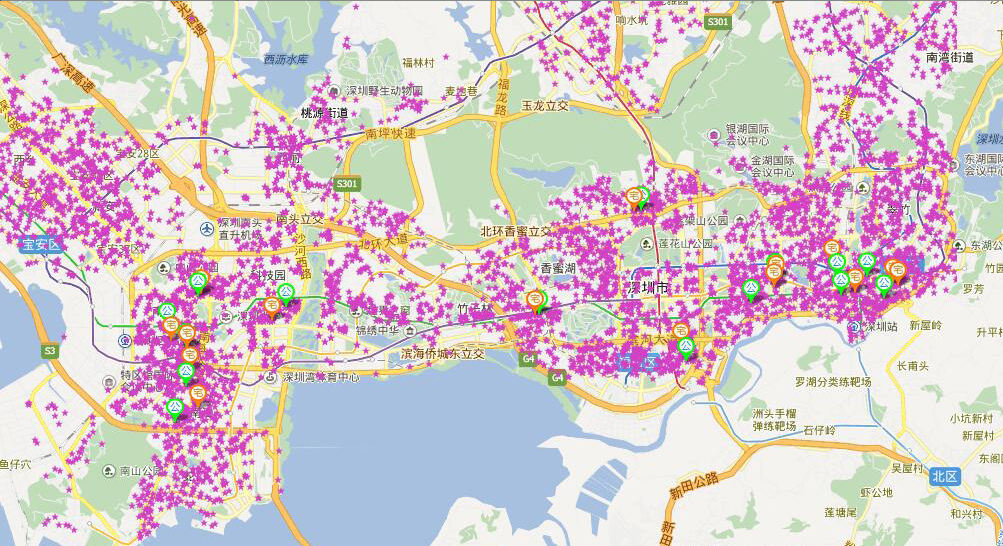
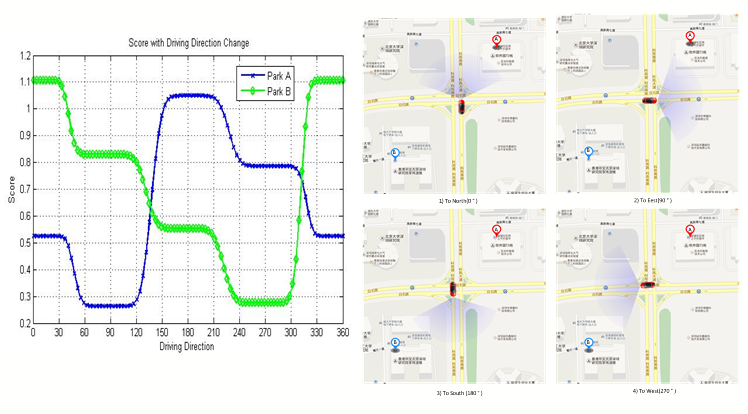
本项目采用城市级停车特征数据快速建模技术,对基于城市中主要类型的停车场所样本的特征分析,提取其时-频数据特征,建立短时预测模型;以这些稀疏样本做时-空扩散算法,对城市级其他停车场进行扩散覆盖;根据实际误差基于神经网络进行模型修复收敛。 同时研发以用户为中心的停车场实时搜索算法,根据车辆的行进路线,行驶方向,到达目的地等诸多用户上下文环境因素,设计基于神经网络的聚类匹配算法,实现个性化停车场在途搜索和推荐功能。
由于停车是车辆的刚需行为,PGIS在城市交通中的重要作用甚至超过导航,因此在短时间内,基于本项目成果采用低廉成本建立覆盖城市绝大部分停车场所/路段的PGIS,向车辆提供一对一的精准诱导服务,其社会效益和商业价值都十分巨大。
成果 / Intellectual Properties
代表性论文 / Selected Papers
Wan Zou; Yuqiang Sun; Qinghao Lu; Yan Nie; Lei Peng,Limited Sensing and Deep Data Mining: A New Exploration of Developing City-wide Parking Guidance Systems,IEEE Intelligent Transportation Systems Magazine,2020(SCI,JCR=Q2)
张康帅;彭磊,可视化城市级停车场服务能力动态覆盖模型,集成技术,(5):48-57,2020
Crowd-parking: A New Idea of Parking Guidance Based on Crowdsourcing of Parking Location Information from Automobiles,Yan Nie,Kun Xu,Haoyan Chen, Lei Peng*,IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society
Qinghao Lu Zhiling Tang Yan Nie and Lei Peng*,ParkingRank-D: A Spatial-temporal Ranking Model of Urban Parking Lots in City-wide Parking Guidance System,2019 IEEE Intelligent Transportation Systems Conference(ITSC)
代表性专利 / Selected Patents
发明专利,基于时空特征的城市停车场排序方法、装置、终端及介质,申请号PCT/CN2019/087081,申请日2019-05-15
发明专利,基于时空特征的停车诱导方法、装置、设备及存储介质,申请号PCT/CN2019/086054,申请日2019-05-08
