整车控制系统包括动力系统、能量系统、底盘电子控制系统、照明指示系统、仪表显示系统、辅助系统、整车综合控制系统、空调系统和安全系统等等。整车控制是电动汽车控制系统核心,承担整车数据的交换、整车安全管理、驾驶员意图传递、动力分配管理和能量分配管理的任务,影响者整车的动力性和经济性、安全性、驾驶舒适性与整车的协调控制。
研究方向简介 / Research Direction
全向智能电动车OAEGV / Selected Projects
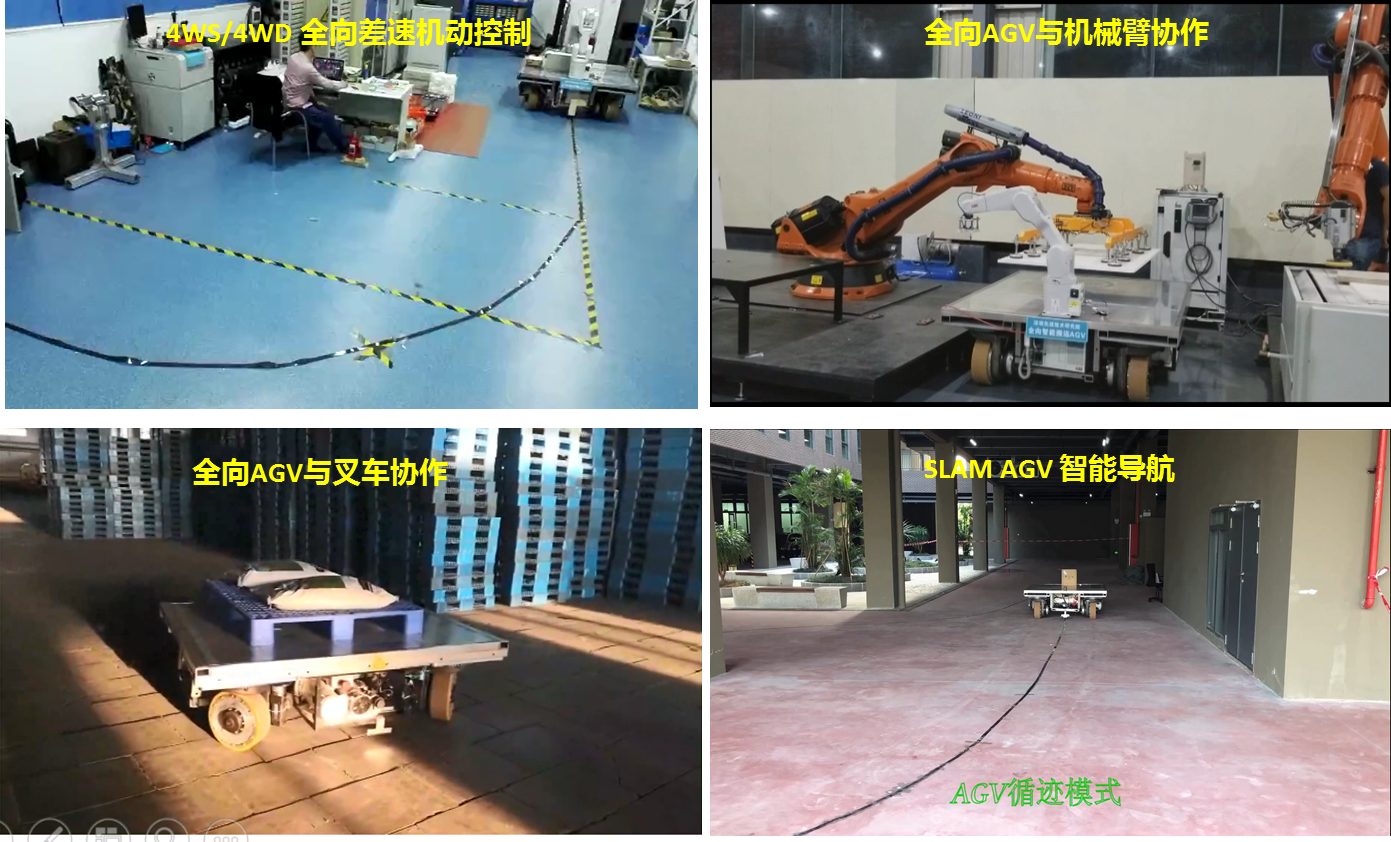
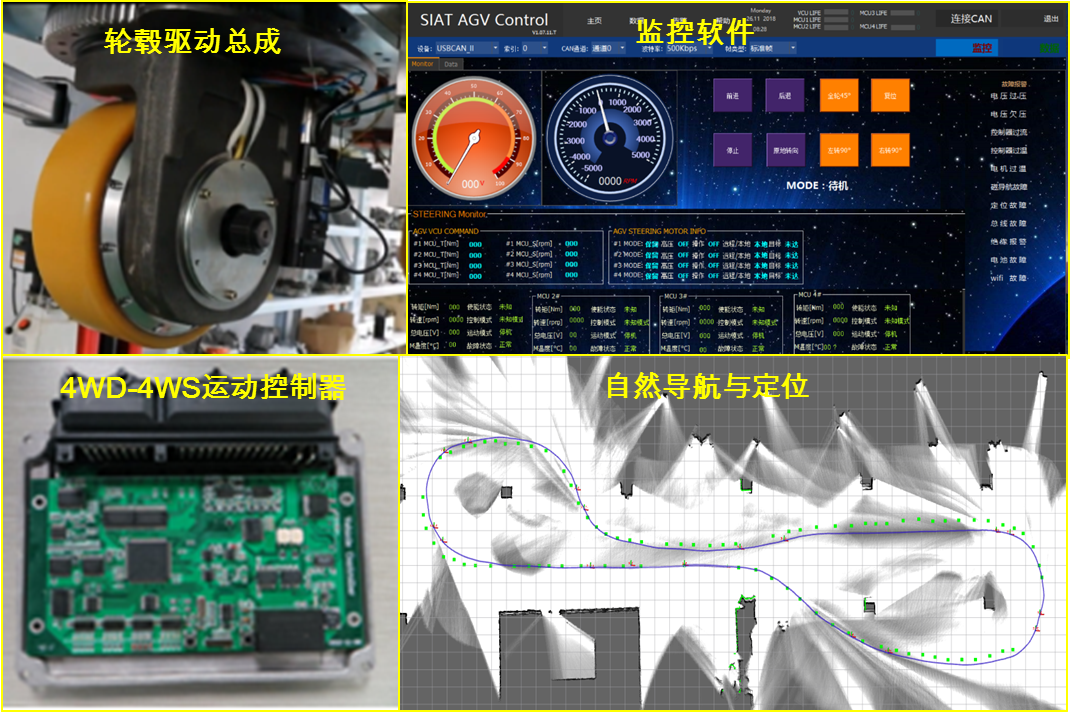
OAEGV主要特色有:1)轮毂电机实现四轮独立驱动,具备大载荷高速移动能力;2)实时可靠的四轮独立驱动+四轮独立转向的运动协调控制策略,保证车辆运动的平顺性;3)基于预测控制的高可靠性和高精度的轨迹跟踪策略;4)多传感器融合的导航定位算法,在复杂动态环境下确保定位的准确性;5)开发专有的分层式控制器硬件在环测试平台HCIL(Hierarchical-Controller-in-the-loop),采用了高保真的多体动力学车辆模型,可实现控制策略的快速迭代优化;6)面向高效协同的多车(机)智能协作策略;7)智能路面感知技术保证车辆的运动稳定和安全性。
团队已完成了OAGV模块化软硬件平台的搭建,并在多种应用场合进行了运行测试。OAEGV是厂区内无人搬运、园区自动巡检、智能农场等的理想移动平台。如果配备执行装备(如机械臂),OAEGV可胜任更为复杂、精细的任务。
成果 / Intellectual Properties
代表性论文 / Selected Papers
1.Accelerating the Validation of Motion Control for a 4WD4WS Ground Vehicle Using a Hierarchical Controller Hardware-in-the-loop System,Hao Sun; Huiyun Li;Yudong Li;Zhibing Song;Kun xu,The 2019 IEEE International Conference on Robotics and Biomimetics(ROBIO)
2.Zahid T, Xu K, Li W M, et al. State of charge estimation for electric vehicle power battery using advanced machine learning algorithm under diversified drive cycles [J]. Energy, 2018, 162:871-882.
3.Hu Y, Li W, Xu K, et al. Energy Management Strategy for a Hybrid Electric Vehicle Based on Deep Reinforcement Learning [J]. Applied Sciences-Basel, 2018, 8 (2), 187.
代表性专利 / Selected Patents
发明专利,一种判断牵引状态下的车辆工作状态的方法和系统, 2018.12.21, 中国, ZL201410783813.2
