整车控制系统包括动力系统、能量系统、底盘电子控制系统、照明指示系统、仪表显示系统、辅助系统、整车综合控制系统、空调系统和安全系统等等。整车控制是电动汽车控制系统核心,承担整车数据的交换、整车安全管理、驾驶员意图传递、动力分配管理和能量分配管理的任务,影响者整车的动力性和经济性、安全性、驾驶舒适性与整车的协调控制。
研究方向简介 / Research Direction
基于多传感器融合的车辆定位与导航技术 / Selected Projects
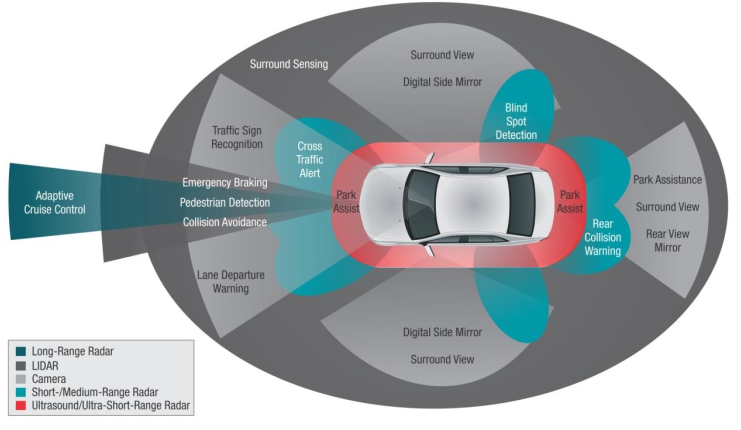
车辆对周围环境3维感知的精确性很大程度影响了车辆定位,建图,路径规划的能力,而这三点又是无人驾驶汽车的基本能力。传统的定位技术基于GPS来完成,但是在车辆驾驶的环境中,常有GPS信号丢失的情况,例如隧道,地下停车场。如何解决在这些场景下汽车的定位,成为了当前热门的研究挑战。在物理测量过程中,每一种传感器都存在一定的误差,由此基于视觉,激光雷达,IMU等多传感器的融合技术成为了主流方向,在克服误差的同时也能更好地推动无人驾驶汽车的产业化发展,本项目致力于多种廉价传感器融合技术的研发。
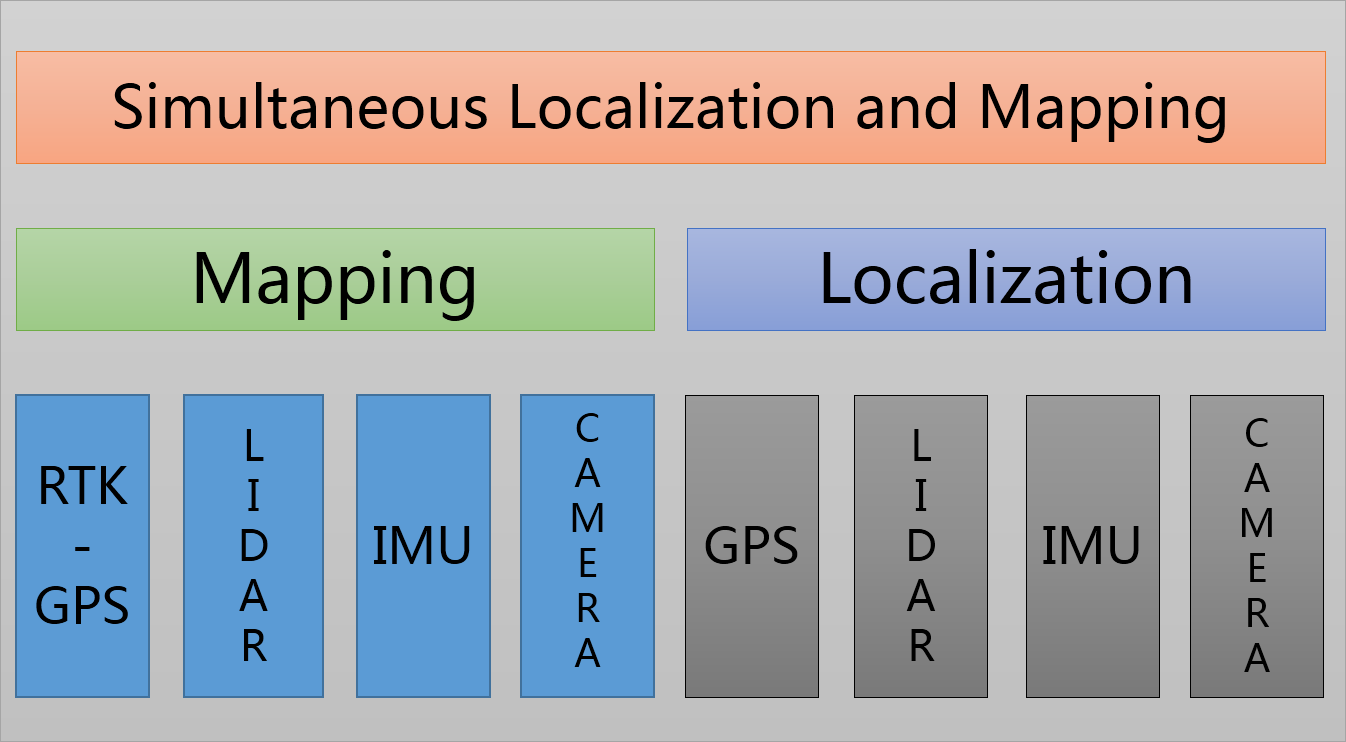
车辆的自生定位与其对周边3维环境的感知相辅相成,对实时性的要求也在一定程度上加大了车辆在行进过程中的定位难度,即时定位与地图构建(SLAM)由此而生,传统方法采用激光雷达进行,但是高昂的成本阻碍了产业化的发展,由此基于视觉的定位与建图技术(VSLAM)成为研究热点,本项目中也以此为车辆定位技术的重点研究方向。
除此之外将SLAM技术与差分GPS的结合,将推动车辆对当前及全局场景的理解,在此基础上如何给车辆规划出一条安全,合理,经济,舒适的路径前往目的地,并在行进的过程中,如何及时有效地避开障碍物,也是本项目的重要组成部分。
成果 / Intellectual Properties
代表性论文 / Selected Papers
Hui Huang , Huiyun Li*, Wenqi Fang and Shaobo Dang, cuiping Shao, Tianfu Sun, Data Redundancy Mitigation in V2X based Collective Perceptions, IEEE Access, Volume: 8, Page(s): 13405 – 13418, 10 January 2020, (IF= 4.098, SCI, JCR Q1)
Lutao Chu; Huiyun Li; Zhiheng Yang,Accurate Scale Estimation for Visual Tracking with Significant Deformation,IET Computer Vision,14(5),2020,(IF= 1.516, SCI, JCR Q3)
代表性专利 / Selected Patents
发明及PCT专利:一种基于聚类和极限学习机的自动驾驶决策方法,2017/5/12,PCT/CN2017/084081
发明专利:车辆自动驾驶控制策略模型生成方法、装置、设备及介质,2018/2/27,CN201810163708.7
