整车控制系统包括动力系统、能量系统、底盘电子控制系统、照明指示系统、仪表显示系统、辅助系统、整车综合控制系统、空调系统和安全系统等等。整车控制是电动汽车控制系统核心,承担整车数据的交换、整车安全管理、驾驶员意图传递、动力分配管理和能量分配管理的任务,影响者整车的动力性和经济性、安全性、驾驶舒适性与整车的协调控制。
研究方向简介 / Research Direction
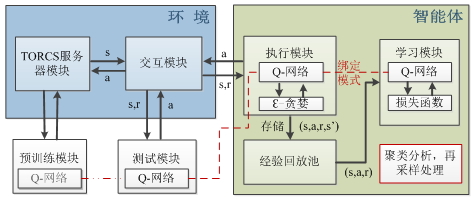
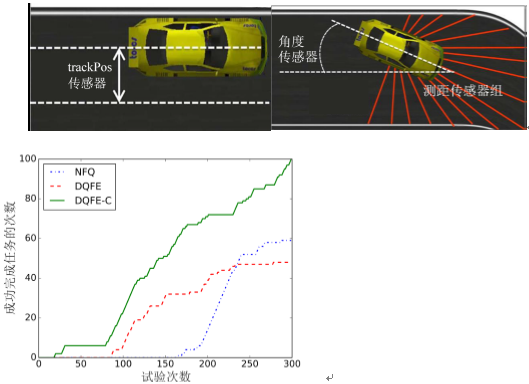
强化学习与自动驾驶策略 / Selected Projects
成果 / Intellectual Properties
代表性论文 / Selected Papers
1.Junta Wu, Huiyun Li*, Deep Ensemble Reinforcement Learning with Multiple Deep Deterministic Policy Gradient Algorithm, Mathematical Problems in Engineering, vol. 2020, Article ID 4275623, 12 pages, 2020 (IF= 1.179, SCI, JCR Q3)
2.夏伟,李慧云*,基于深度强化学习的自动驾驶策略学习方法,集成技术,第6卷 第3期,2017 年5 月
代表性专利 / Selected Patents
1.发明专利,一种汽车的自动驾驶方法与装置,申请号:201710156331.8,申请日:2017.3.16
2.发明专利,一种用于车辆自动驾驶的决策网络模型的生成方法及装置,申请号:201710201086.8,申请日:2017.3.30
