The control system of electric vehicle(EV) system includes power driving system, energy management system, chassis electronic control system, lighting system, indicating instrument display system, auxiliary system, vehicle control system, air conditioning system and security system etc.. The control system is the core of the control in EV, which undertakes vehicle data exchange, vehicle safety management, Driver’s intention, power distribution management and energy distribution management. It is impact to economy, safety, driving comfort and dynamic coordinated control of vehicle.
The main research area is
1. Advanced vehicle dynamics control
2. Power distribution management strategy for electric vehicles
3. Energy distribution management strategy for electric vehicles
Selected Papers
1.Junta Wu, Huiyun Li*, Deep Ensemble Reinforcement Learning with Multiple Deep Deterministic Policy Gradient Algorithm, Mathematical Problems in Engineering, vol. 2020, Article ID 4275623, 12 pages, 2020 (IF= 1.179, SCI, JCR Q3)
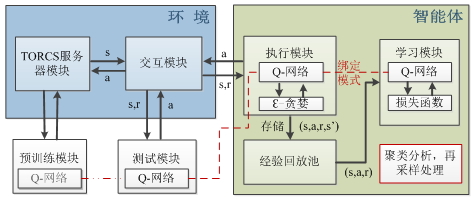
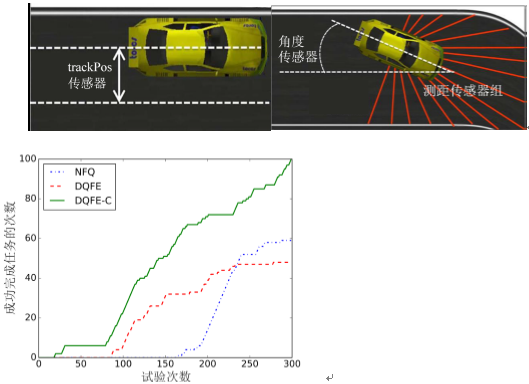
2.夏伟,李慧云*,基于深度强化学习的自动驾驶策略学习方法,集成技术,第6卷 第3期,2017 年5 月
Selected Patents
1.发明专利,一种汽车的自动驾驶方法与装置,申请号:201710156331.8,申请日:2017.3.16
2.发明专利,一种用于车辆自动驾驶的决策网络模型的生成方法及装置,申请号:201710201086.8,申请日:2017.3.30
