The control system of electric vehicle(EV) system includes power driving system, energy management system, chassis electronic control system, lighting system, indicating instrument display system, auxiliary system, vehicle control system, air conditioning system and security system etc.. The control system is the core of the control in EV, which undertakes vehicle data exchange, vehicle safety management, Driver’s intention, power distribution management and energy distribution management. It is impact to economy, safety, driving comfort and dynamic coordinated control of vehicle.
The main research area is
1. Advanced vehicle dynamics control
2. Power distribution management strategy for electric vehicles
3. Energy distribution management strategy for electric vehicles
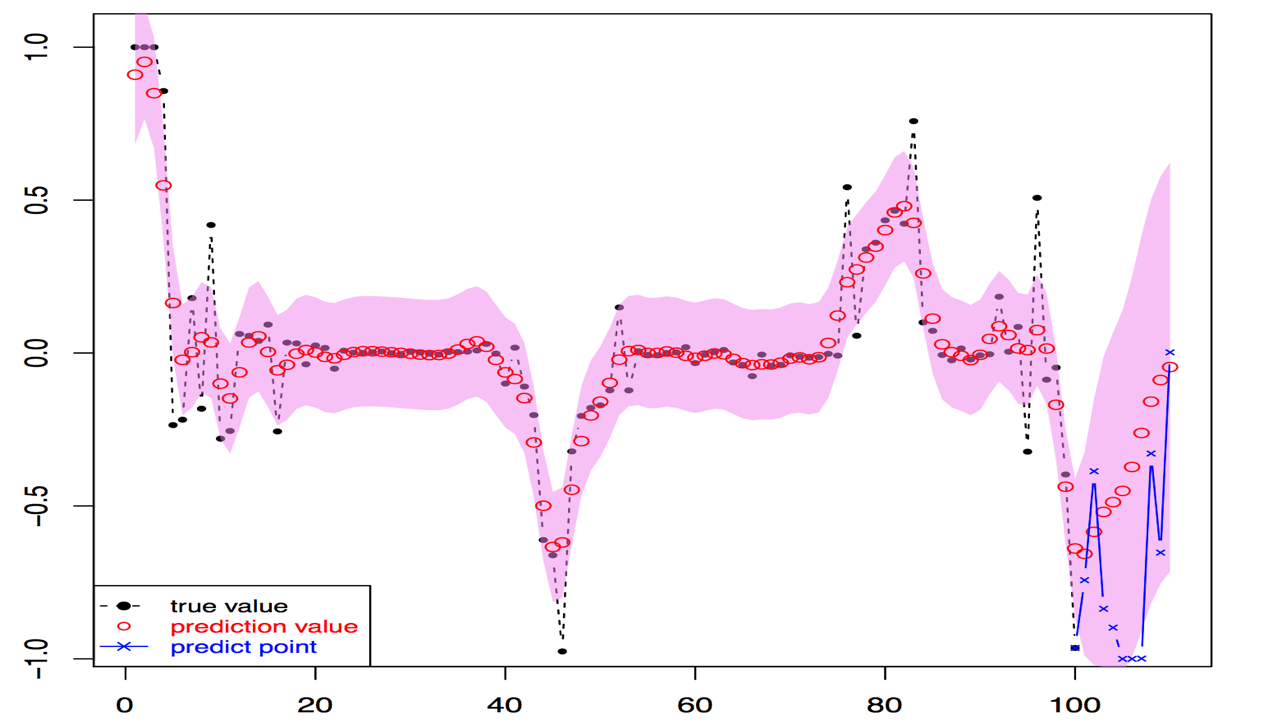
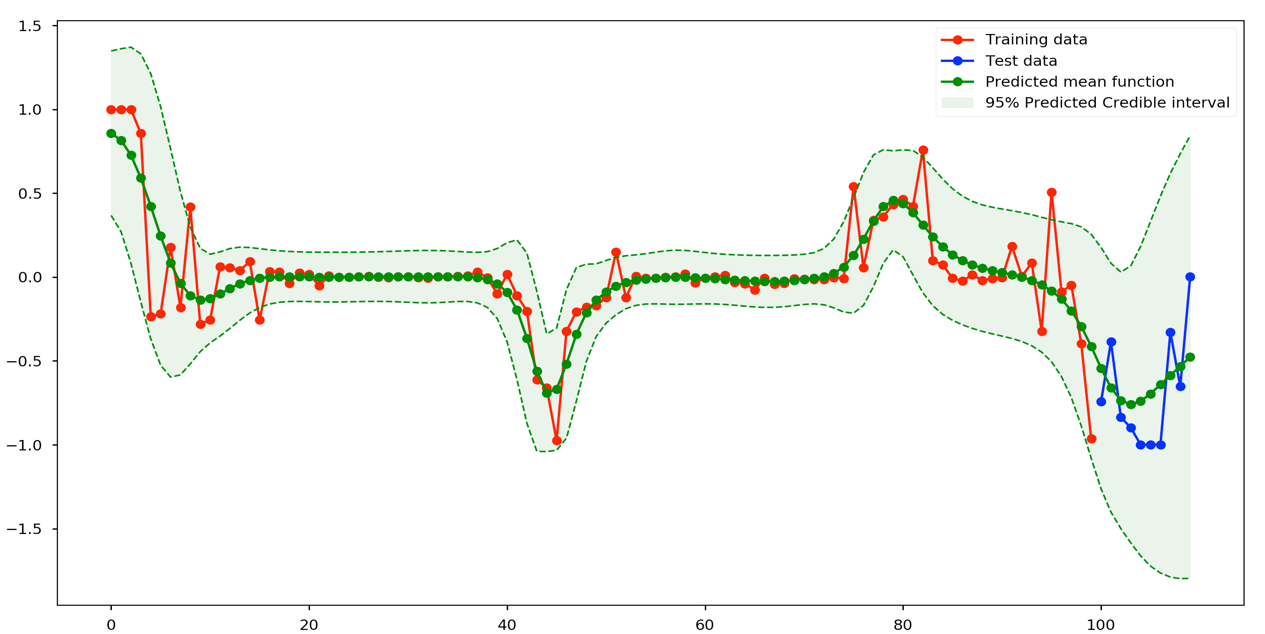
We use bayesian network and bayesian nonparametric models to tackle the small data decision-making problem in self-driving research. Unlike traditional rule-based approach, these methods can take the casual correlation in time series data into serious consideration. They can not only fetch the features of the data effectively, but also significantly reduce dependence on the amount of data. Due to these qualities, they can improve the accuracy of small data decision-making comprehensively.
Selected Papers
Wenqi Fang, Huiyun Li*, Shaobo Dang, Hui Huang, Li-TaHsu, Weisong Wen, Combining deep gaussian process and rule-based method for decision-making in self- driving simulation with small data, 2019 International Conference on Computational Intelligence and Security (CIS2019), Macau, China, December 13-16, 2019.
Selected Patents
发明专利,自动驾驶控制方法和设备,申请号CN201911182934.0,申请日2019-11-27
