驾驶决策是目前自动驾驶研究的重点方向。该系统对感知信息进行处理,利用基于规则的专家系统、深度学习和增强学习或因果推理路线根据具体场景作出适宜驾驶决策。
研究方向简介 / Research Direction
基于小样本数据的贝叶斯推理 / Selected Projects
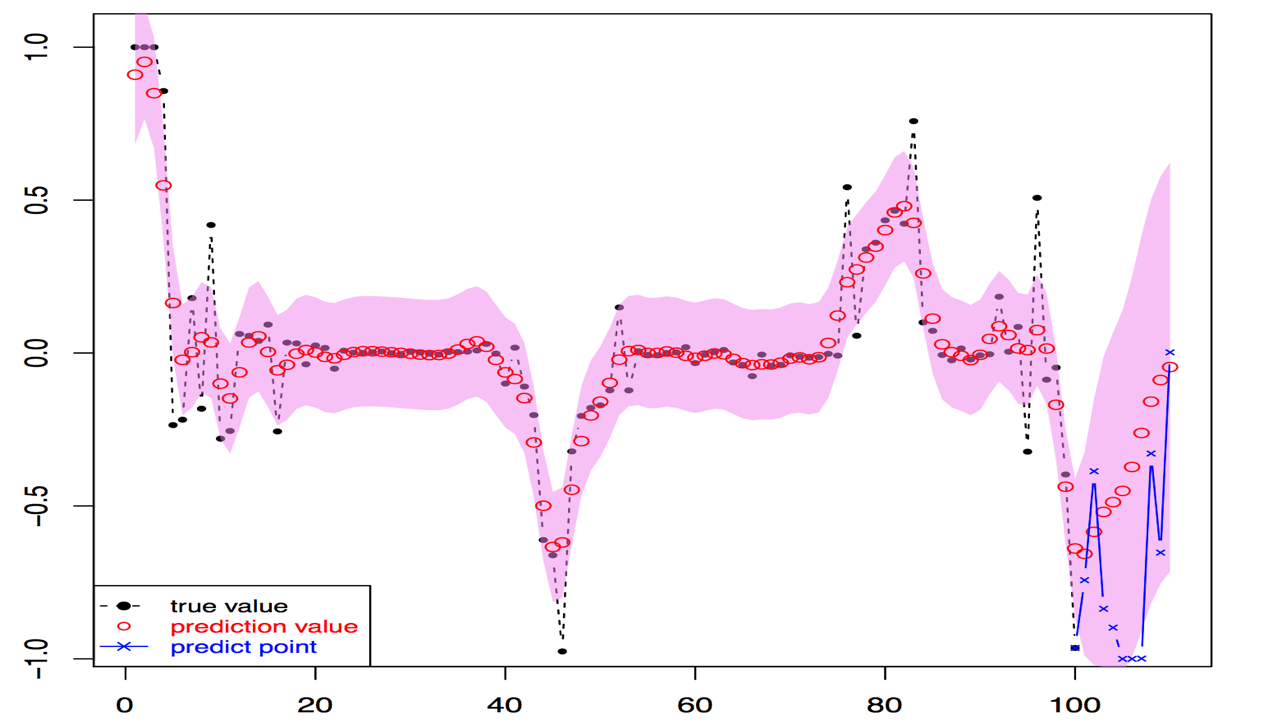
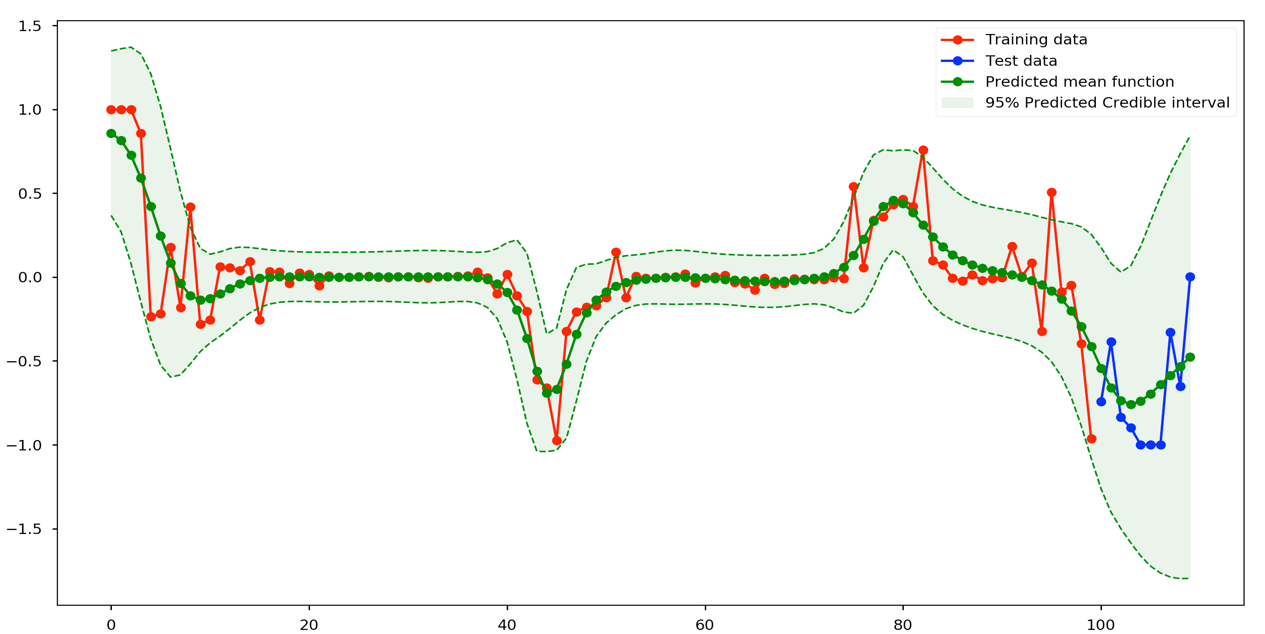
我们运用贝叶斯网络和非参数贝叶斯模型去解决无人驾驶中的小样本决策问题,这些方法能够充分考虑时序数据中的因果关联性,有别于传统的基于规则的方法,不仅能够有效地捕捉到数据的特征,同时能够大幅度降低对数据量的依赖,从而全面提升小样本决策的准确性。
成果 / Intellectual Properties
代表性论文 / Selected Papers
Wenqi Fang, Huiyun Li*, Shaobo Dang, Hui Huang, Li-TaHsu, Weisong Wen, Combining deep gaussian process and rule-based method for decision-making in self- driving simulation with small data, 2019 International Conference on Computational Intelligence and Security (CIS2019), Macau, China, December 13-16, 2019.
代表性专利 / Selected Patents
发明专利,自动驾驶控制方法和设备,申请号CN201911182934.0,申请日2019-11-27
