驾驶决策是目前自动驾驶研究的重点方向。该系统对感知信息进行处理,利用基于规则的专家系统、深度学习和增强学习或因果推理路线根据具体场景作出适宜驾驶决策。
研究方向简介 / Research Direction
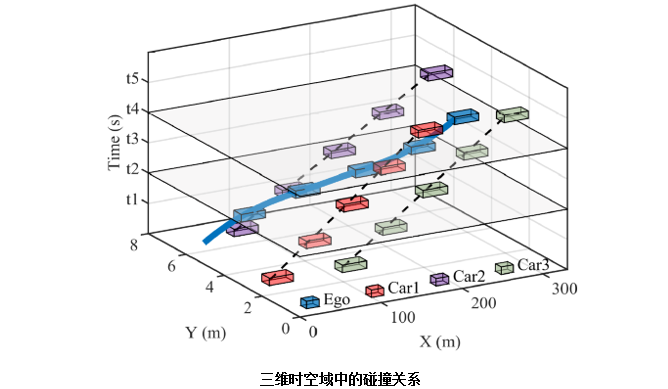
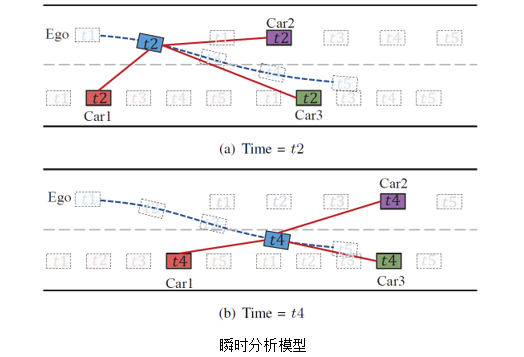
拥挤动态场景下的无人车运动规划方法 / Selected Projects
成果 / Intellectual Properties
代表性论文 / Selected Papers
1.Xiaoyu Yang and Huiyun Li, Model Predictive Motion Planning for Autonomous Vehicle in Mid-high Overtaking Scene, 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 2020
2.Xiaoyu Yang, Huiyun Li and Jie Zou, An End-to-end Obstacle Avoidance Algorithm for Autonomous Vehicles Based on Global Path Constraint, 2020 Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 2020
代表性专利 / Selected Patents
一种融合类人驾驶行为的无人驾驶深度强化学习方法,发明专利,2020.06.16
一种用于车辆自动驾驶的决策网络模型的生成方法及装置发明专利,2020.04.07
一种基于协同演化的自动驾驶车辆决策涌现方法,发明专利,2010.01.20
